6月1日,由河南大学教务处主办,物理与电子学院及物理与电子国家级实验教学示范中心承办的河南大学第二十届“立创EDA杯”智能车竞赛校赛决赛在物理与电子学院创新创业实验室等场地成功举办。本次赛事以创新驱动为核心,通过多元技术竞技与跨场景任务挑战,全面提升学生实践创新能力、团队协作思维与工程攻坚素养,充分展现学院“产教融合、学用相长”的工程教育改革成果。

本次竞赛围绕速度、协同、创新三大维度,精心设置缩微电磁/光电、平衡轮腿、双车跟随、独轮信标、气垫越野、完全模型等八大竞赛组别,深度覆盖传感器融合、动态平衡控制、多车协同导航、复杂地形适应、人机交互等前沿技术方向。赛事构建了涵盖功能性、创新性、任务完成度等多维度的科学评分体系,要求参赛队伍综合运用专业知识,自主设计车模控制方案,独立完成传感器信号采集处理、电机驱动、转向舵机控制等系统的研发、制作与调试工作。
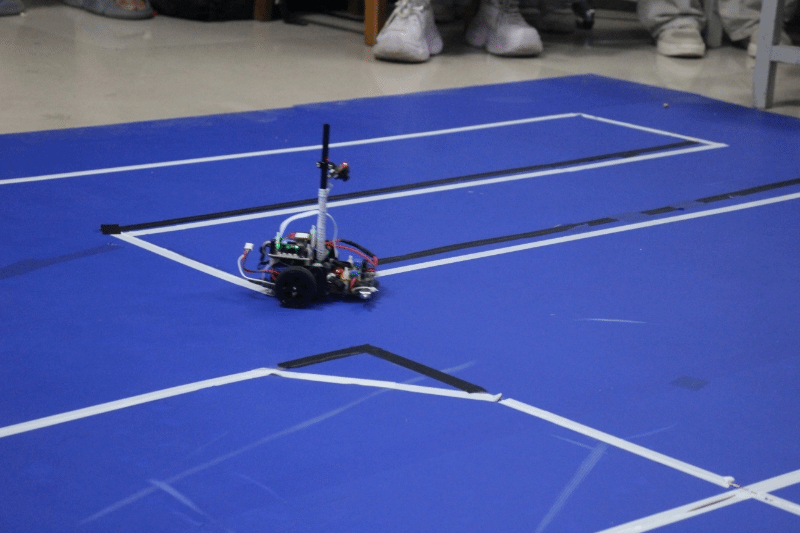
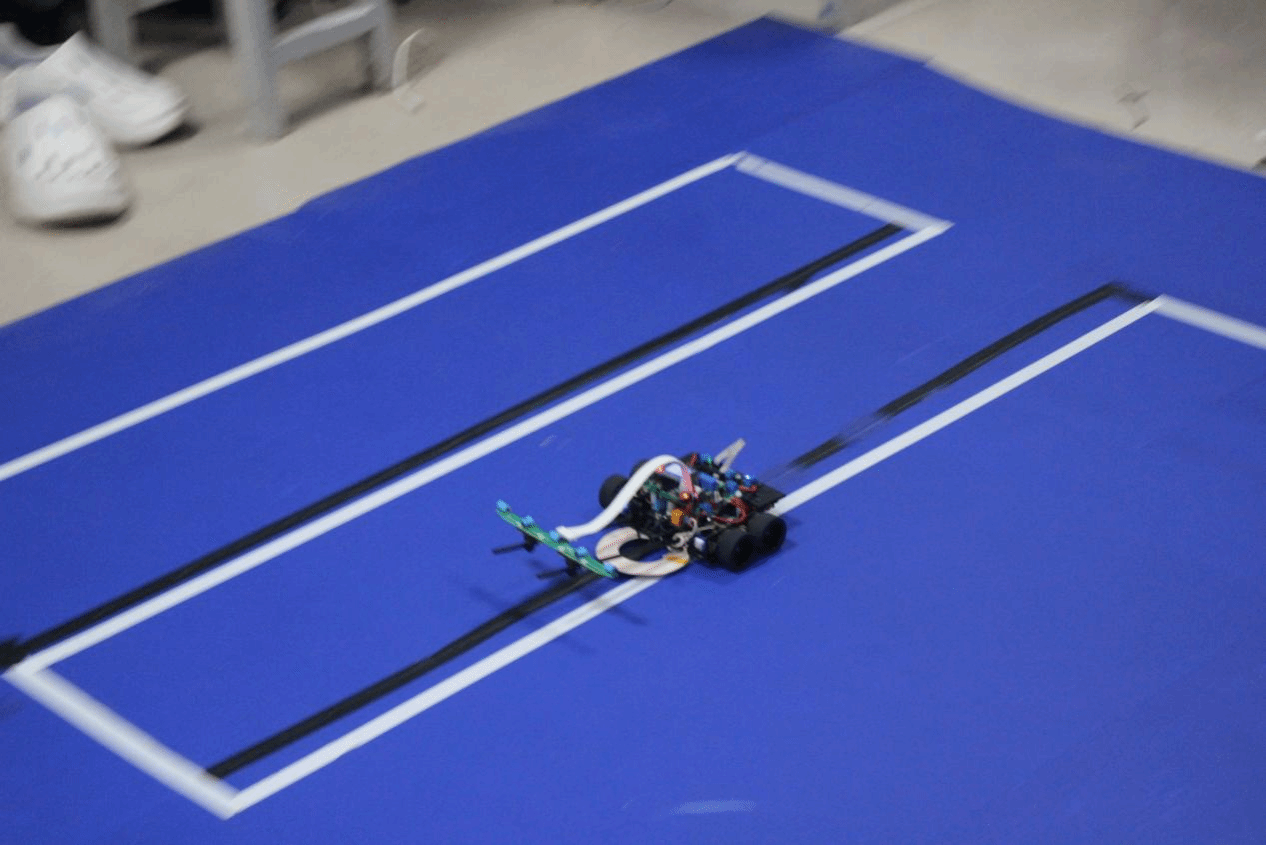
在比赛过程中,各参赛队伍依序展示精心打造的智能车模。缩微赛场内,缩微电磁组凭借电磁传感器与电感元件,精准识别赛道元素实现稳定寻迹;缩微光电组则依托光电传感器,精准捕捉赛道反光条与标记,高效适配光电信号的动态变化,充分诠释“小身材、大能量”的技术魅力。
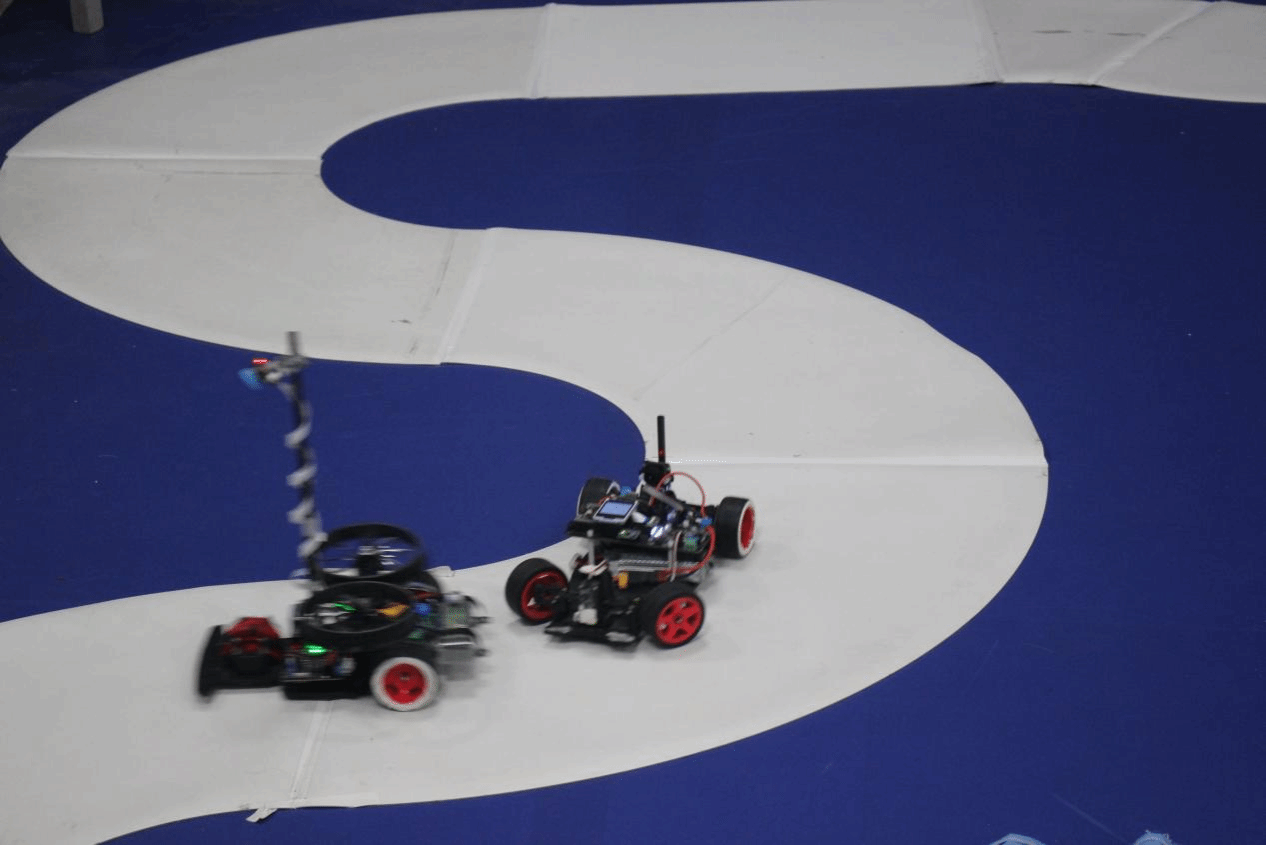
平衡轮腿组,采用V/W型轮腿车模,实现了动态平衡与越障功能。小车自主调整轮腿姿态,通过5cm台阶。在双车跟随组中,主车通过视觉识别赛道,并通过红外信号引导从车完成赛道,完成双车协同任务;独轮信标组中,独轮车模凭借对信标系统的良好兼容性,有序激活赛道信标点,三组车模以卓越表现上演速度与智慧的精彩对决。
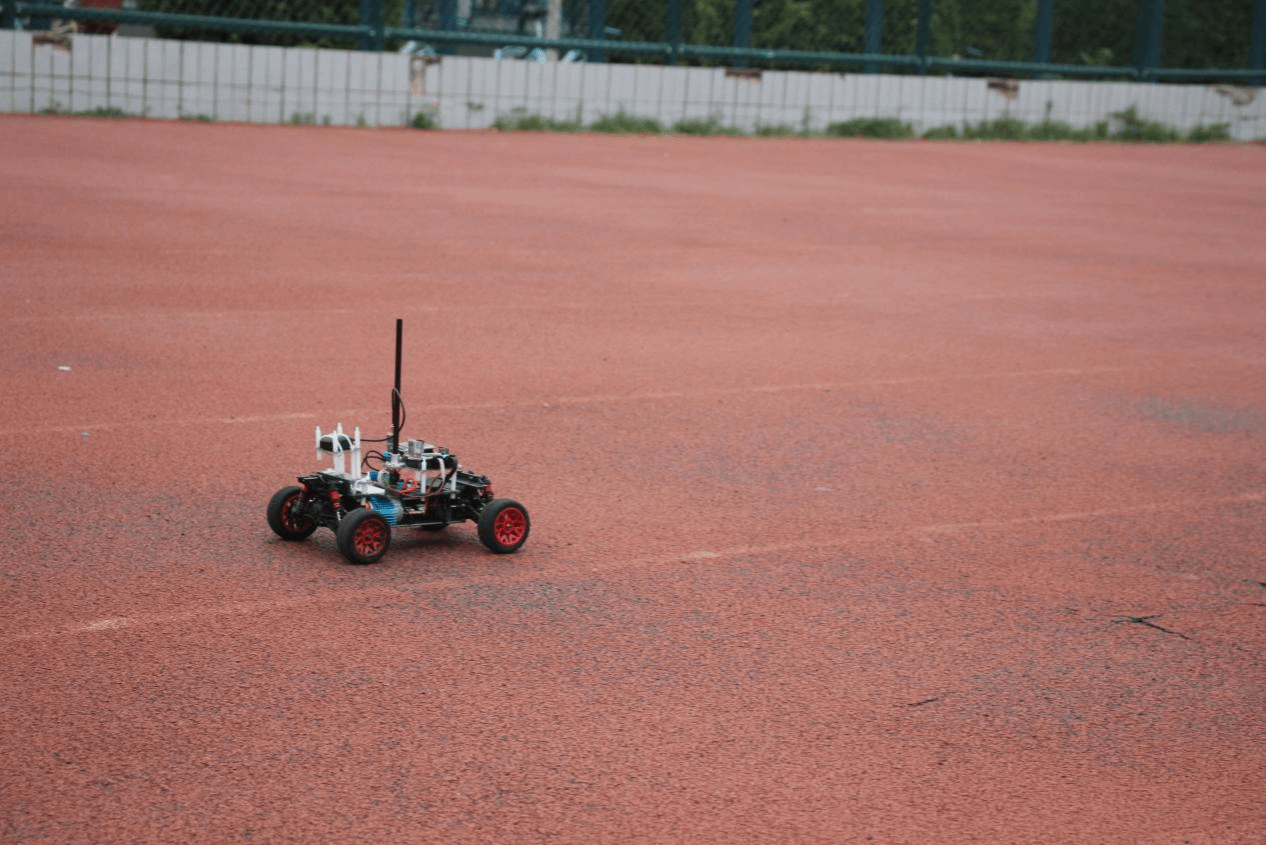
室外赛场上,竞赛氛围更为热烈。极速越野组直面沙地、坡道等复杂地形挑战,新增的语音指令避障人机交互任务,进一步考验智能车的环境适应能力;气垫越野组在操场赛道完成往返赛道竞速、八字型赛道竞速及特殊路况测速等科目,在复杂地形中展开激烈角逐。完全模型组采用I型车模,借助先进的视觉识别技术,快速感知赛道元素,精准完成多目标识别与自主决策导航,其创新设计与出色性能令人瞩目。
此次智能车竞赛不仅充分彰显了河南大学物理与电子学院学子扎实的专业功底与卓越的创新思维,更是学院深化工程教育教学改革、强化学生技能培养的有力证明。赛事中脱颖而出的优胜队伍,将代表学校出征智能车竞赛华北赛。期待他们在更高舞台上继续展现河大学子的风采,为智能科技领域书写新的精彩篇章。


